Vývoj řídicích systémů a Model-Based Design: návrh, modelování, simulace, implementace
Inženýrské nástroje MATLAB & Simulink a dSPACE ve spojení s metodou Model-Based Design nabízí moderní přístupy k vývoji technických systémů, zefektivňují vývojový proces a umožňují dodávat na trh produkty, které splňují požadavky na bezpečnost, spolehlivost, účinnost a výkon. V oblasti řídicích systémů je MATLAB a Simulink využíván k vývoji pokročilých technologií, od robustních a adaptivních regulátorů po řídicí systémy založené na AI.
Moderní řídicí systémy nacházejí uplatnění v celé řadě odvětví, v automobilovém průmyslu, robotice, průmyslové automatizaci, řízení technologických procesů a mnoha dalších.
Hlavní témata
- využití metody Model-Based Design ve vývoji řídicích systémů
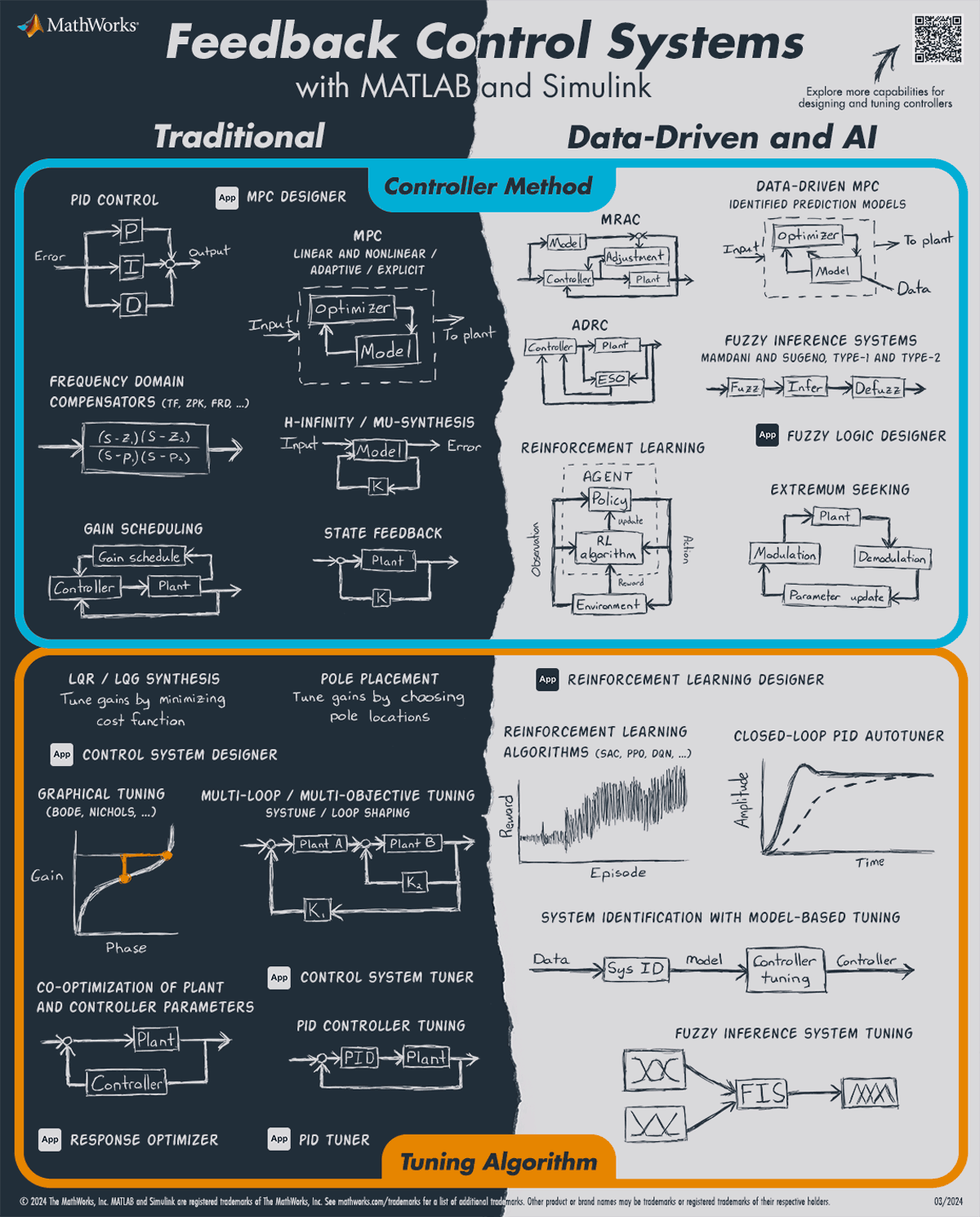
- modelově založené vs. datově orientované metody řízení
- automatické ladění SISO a MIMO systémů
- robustní řídicí systémy a systémy s kompenzací poruch
- adaptivní a prediktivní řídicí systémy
- řídicí logika pro plánování, přepínání režimů nebo detekce poruch
- využití AI v návrhu řídicích systémů
- testování řídicích systémů v reálném čase, rapid control prototyping
- implementace řídicích systémů na vestavěné (embedded) platformy
Zveme všechny technické pracovníky z komerčního sektoru i zájemce z řad akademické obce.
Fotogalerie z minulého ročníku




Report a přednášky z minulého ročníku Otevřít celou fotogalerii